石鑫华视觉
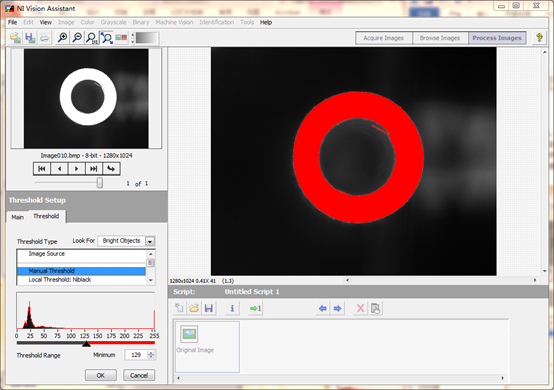
图像处理中的二值化二值化后,图像变成简单的0/1图像。均匀性会得到较大的提高。但是二值化后会丢失许多信息,因此其实际测量时,如果没有必要,可以不用二值化。从实际应用经验来看,二值化后的图像用于测量尺寸时,在进行重复性测量时,测量值不太容易变化,但是一旦变化,则会以一个像素进行变化。而灰度图像的,比较容易...
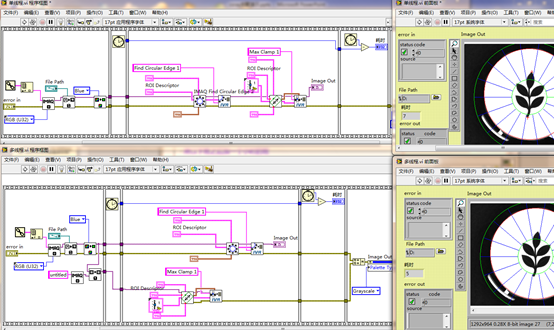
图像处理中的多线程处理对于现在的计算机而言,核心数目都比较多,内存也比较大,所以一般都可以很轻松的应对多线程的程序。而图像处理中,要想获得较高的效率,也应该考虑使用多线程。除非一定需要执行顺序结构,不然都是应该考虑使用并行的多线程结构的。这样对于生产效率的提高是非常有利的。下图是简单的表现了一下并行...
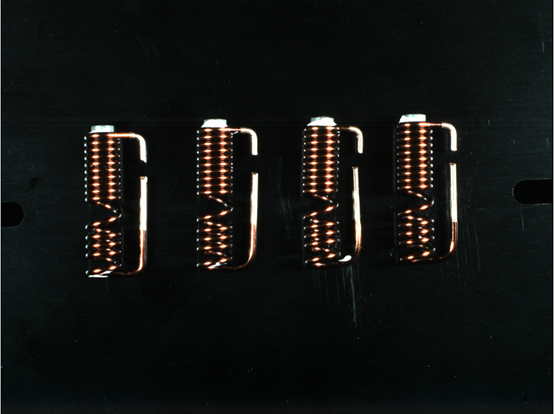
图像处理中的彩色图像彩色图像的处理,需要注意的是颜色的选择。通常大家会认为颜色越真实越好。其实不然,颜色的反应是需要根据实际情况进行选择的,只有在测量颜色本身的值时,才会考虑要真实的还原色彩,而需要还原真彩时,这个就不仅仅只是软件上的考虑了,还要考虑工业相机、工业镜头、机器视觉光源等硬件。 &nb...
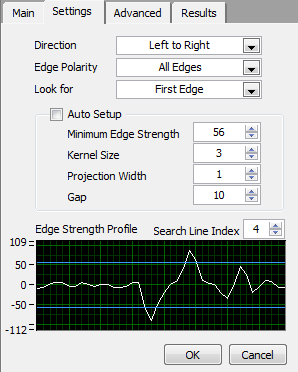
图像处理中常用参数用法图像处理中,无论是什么处理平台、或图像处理库,有些参数是共同的。大部分的算法中,都会有一个kernel Size内核尺寸的参数,即使用多大尺寸的内核去计算需要的特征。使用内核尺寸,可以综合考虑某个像素点领域中的其它像素值,从而能够更准确的判断出特征。内核尺寸越大,得到的特征越准确,能有效的...
机器视觉中的标定Calibration一组操作,其第一步是在规定条件下确定由测量标准提供的量值与相应示值之间的关系,这里测量标准提供的量值与相应示值都具有测量不确定度,第二步则是用此信息确定从示值与所获得测量结果的关系。一般来讲,机器视觉领域中使用的都是简单标定。即简单的将测量得到的像素坐标转换到世界坐标,通俗...
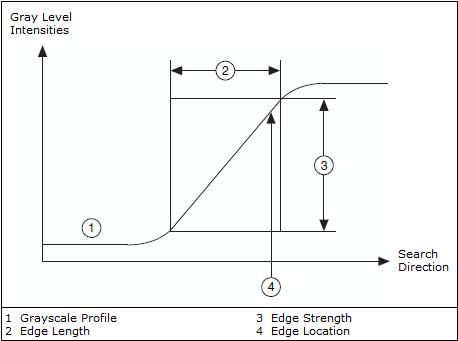
NI视觉中对比度的定义下图为NI定义的边缘。其中1为灰度剖面图曲线,2为边缘长度(即过渡区域),3为边缘强度(对比度、灰度差),4为边缘位置。对比度(边缘强度)可以简单理解为δY/δX,即灰度差/过渡区域。灰度差越大,过渡区域越小,则对比度越大,越利于提取图像特征。NI Vision定义的边缘与对比度...
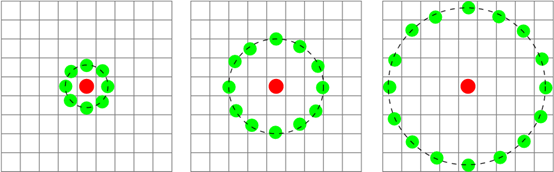
局部二值模式概述局部二值模式(英文:Local binary patterns,缩写:LBP)是机器视觉领域中用于分类的一种特征,于1994年被提出。局部二值模式在纹理分类问题上是一个非常强大的特征;如果局部二值模式特征与方向梯度直方图结合,则可以在一些集合上十分有效的提升检测效果。局部二值模式是一个简单但非常有效的纹理运算符...
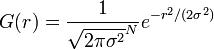
高斯平滑高斯平滑概述高斯平滑(英语:Gausscian Smoothing),也叫高斯模糊(英语:Gausscian Blur),是在NI Vision、 Adobe Photoshop、GIMP 以及 Paint.NET 等图像处理软件中广泛使用的处理效果,通常用它来减少图像噪声以及降低细节层次。这种模糊技术生成的图像,其视觉效果就像是经过一个半透明屏幕在观察图像,这与...