石鑫华视觉
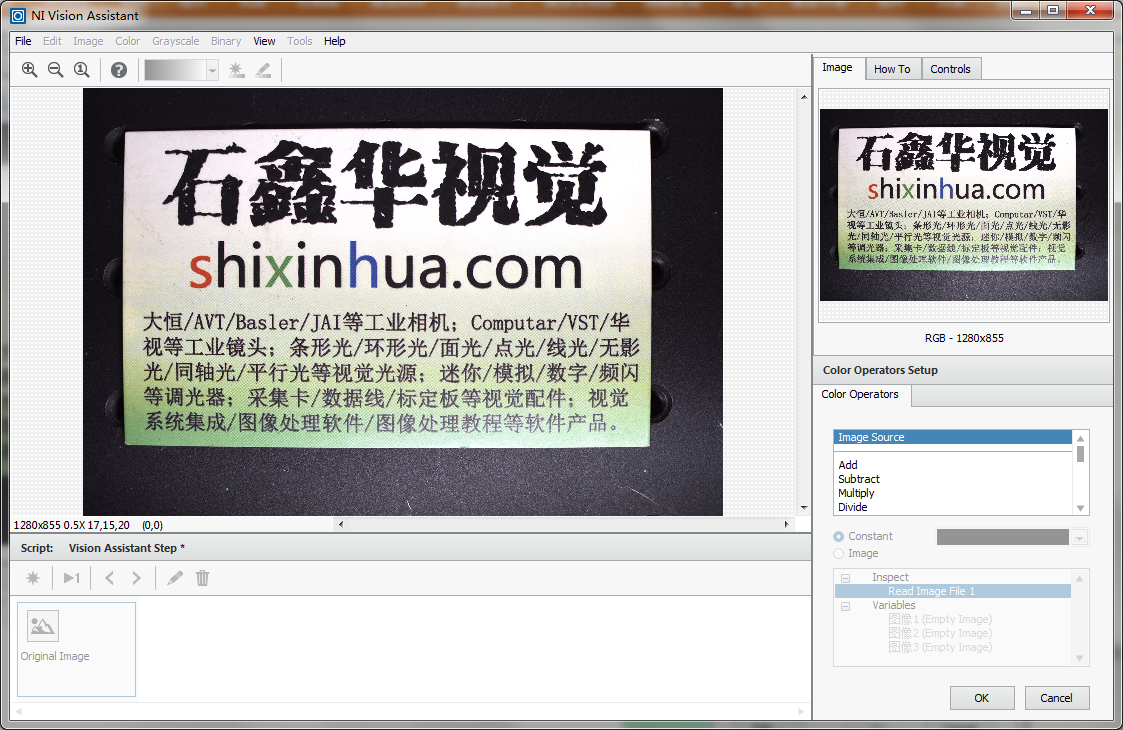
VBAI2020中的视觉助手中的Color Operators颜色算子函数列表与实际调用的算子不匹配的BugVBAI2020中的视觉助手函数,其中的Color Operators颜色算子,包含了数学运算符,如加减乘除;也包含了逻辑运算符,如与或异或等。但是在VBAI2020版本中,功能列表中的很多函数,与实际调用的算子并不一致:VBAI列表这里的列表中,前面的...
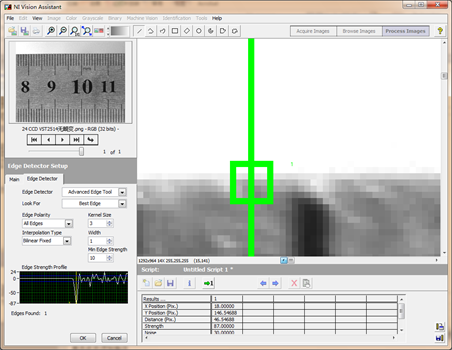
图像处理中实际上的对比度值前面提到图像处理中理论上的对比度值,理论上的对比度值无论多高,总是能找到图像边缘。但是实际图像过渡区域比较多,这时就需要考虑图像的黑白灰度差了。图1为直尺左边缘对比度,约为87;图2为直尺右边缘对比度,约为32。当然这里不会简单的理解为(边缘-背景)/过度区域,还要使用算子、宽度等...
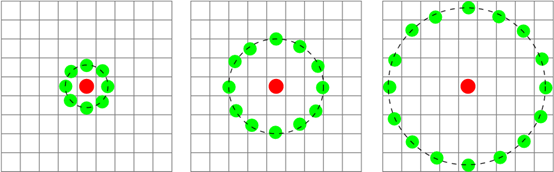
局部二值模式概述局部二值模式(英文:Local binary patterns,缩写:LBP)是机器视觉领域中用于分类的一种特征,于1994年被提出。局部二值模式在纹理分类问题上是一个非常强大的特征;如果局部二值模式特征与方向梯度直方图结合,则可以在一些集合上十分有效的提升检测效果。局部二值模式是一个简单但非常有效的纹理运算符...

哈尔特征哈尔特征概述哈尔特征(Haar-like features) 是用于物体识别的一种数字图像特征。它们因为与哈尔小波转换极为相似而得名,是第一种实时的人脸检测算子。历史上,直接使用图像的强度(就是图像每一个像素点的RGB值)使得特征的计算强度很大。帕帕乔治奥等人提出可以使用基于哈尔小波的特征而不是图像强度。维奥...

索贝尔算子Sobel operator索贝尔算子的定义索贝尔算子(Sobel operator)是图像处理中的算子之一,主要用作边缘检测。在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。索贝尔算子公式该算子包含两组3x3的矩阵,分别为横向及纵向,将...

Canny边缘检测算子Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory of edge detection)解释这项技术如何工作。Canny 算法的发展Canny 的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:·&nbs...
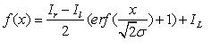
边缘检测Edge Detection边缘检测概述边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化。 这些包括(i)深度上的不连续、(ii)表面方向不连续、(iii)物质属性变化和(iv)场景照明变化。 边缘检测是图像处理和计算机视...