石鑫华视觉
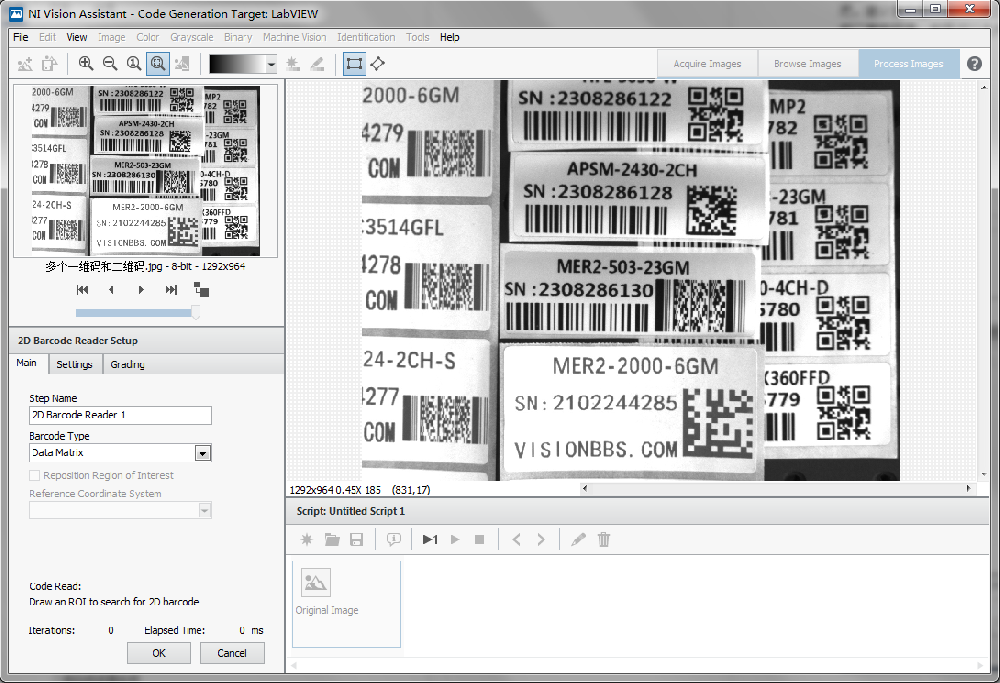
NI视觉助手二维码阅读器默认参数读取不到数据矩阵码的问题默认参数全图搜索数据矩阵二维码-找不到二维码 在Code Read码读取返回中显示画ROI来搜索二维码:画ROI后仍然未能搜索到数据矩阵二维码在上面的默认设置界面中,使用全图/ROI查找数据矩阵二维码时,没有找到二维码,...
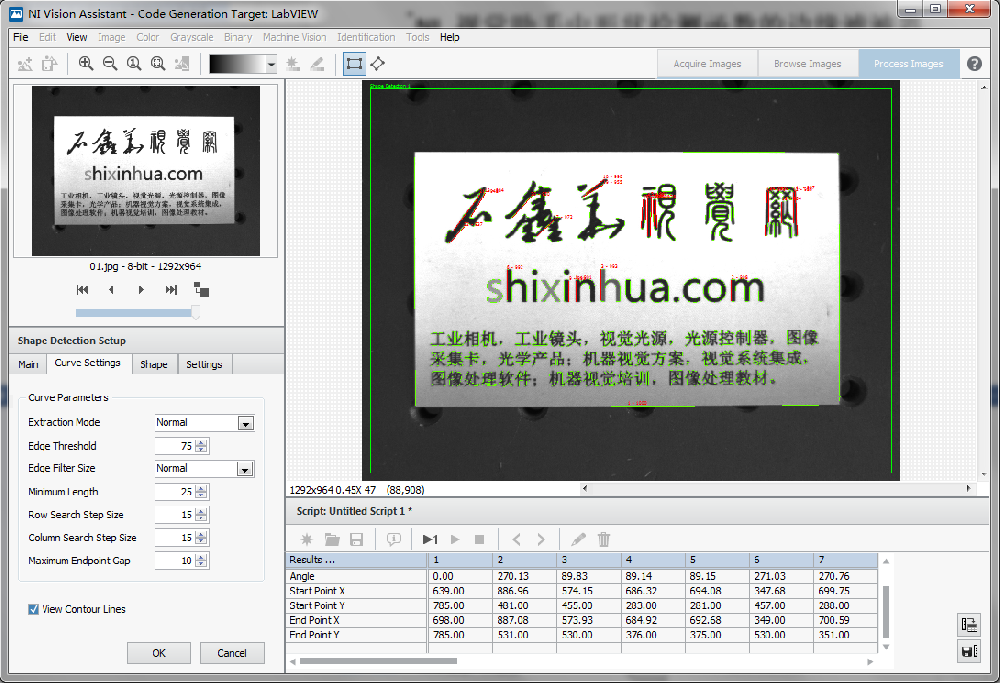
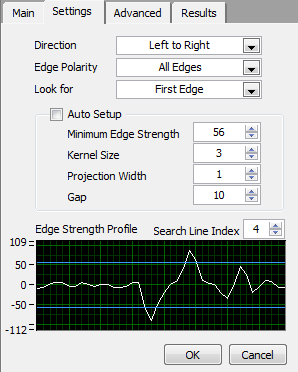
NI视觉助手中形状检测函数的边缘滤波器大小参数没有轮廓跟踪选项形状检测-边缘滤波器大小Edge Filter Size边缘滤波器大小:指定用于计算图像中边缘的内核大小。选项包括Normal正常、Fine精细和Contour Tracing轮廓跟踪。默认值为Normal正常,这将生成最快的结果。在视觉助手2020SP1片中的形状检测函数的边缘滤波器有点小问题...

NI视觉助手Vision Assistant教程第二章 菜单 第一节 文件菜单NI视觉助手的菜单,包含了所有的功能。主要功能有File文件、Edit编辑、View查看、Image图像、Color彩色、Grayscale灰度、Binary二值、Machine Vision机器视觉、Indentification识别、Tools工具、Help帮助等。如图1所示:图1 NI视觉助手菜单下面来看一下每个菜单的...
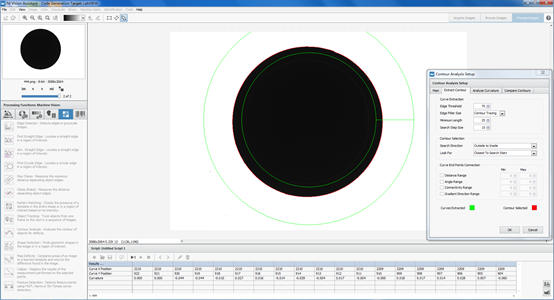
NI Vision轮廓分析参数调整说明对于标准的圆周产品,对其做圆周缺陷检测时,轮廓分析是一种比较实用的方法。如果轮廓对比度比较好,又干净没有干扰,那么使用NI Vision的默认参数都可以很快速准确的找到目标轮廓:干净对比度高的圆周-默认参数找到轮廓而在轮廓分析时,如果干扰较多时,则需要调整参数,才能快速找到目标轮廓...
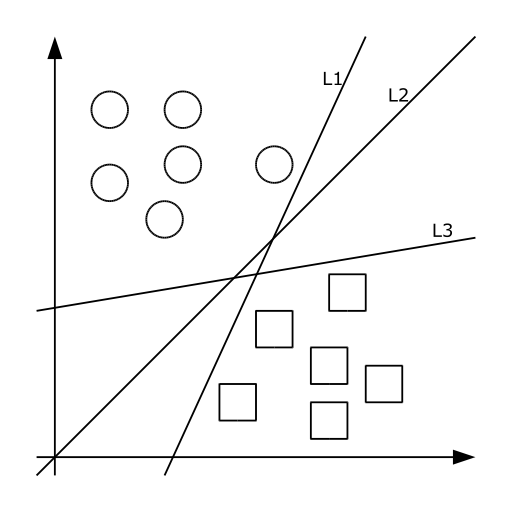
支持向量机SVM支持向量机(英语:Support Vector Machine,学术文献中常简称为SVM,中文简称则是SV机)是一种监督式学习的方法,可广泛地应用于统计分类以及回归分析。支持向量机属于一般化线性分类器,也可以被认为是提克洛夫规范化(Tikhonov Regularization)方法的一个特例。这族分类器的特点是他们能够同时最小化经验误...
图像处理中常用参数用法图像处理中,无论是什么处理平台、或图像处理库,有些参数是共同的。大部分的算法中,都会有一个kernel Size内核尺寸的参数,即使用多大尺寸的内核去计算需要的特征。使用内核尺寸,可以综合考虑某个像素点领域中的其它像素值,从而能够更准确的判断出特征。内核尺寸越大,得到的特征越准确,能有效的...

三维块匹配算法BM3D三维块匹配算法定义三维块匹配算法(英语:Block Matching 3D,縮寫:BM3D)是一个效果比较好的图像去噪算法。通过与相邻图像块进行匹配,将若干相似的块整合为一个三维矩阵,在三维空间进行滤波处理,再将结果反变换融合到二维,形成去噪后的图像。该算法去噪效果显著,可以得到目前为止最高的峰值信噪比...

Canny边缘检测算子Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory of edge detection)解释这项技术如何工作。Canny 算法的发展Canny 的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:·&nbs...