CMCH柱面镜芯高测量系统
CMCH柱面镜芯高测量系统
本系统主要用于测量柱面镜的芯高光束的位置和宽度。
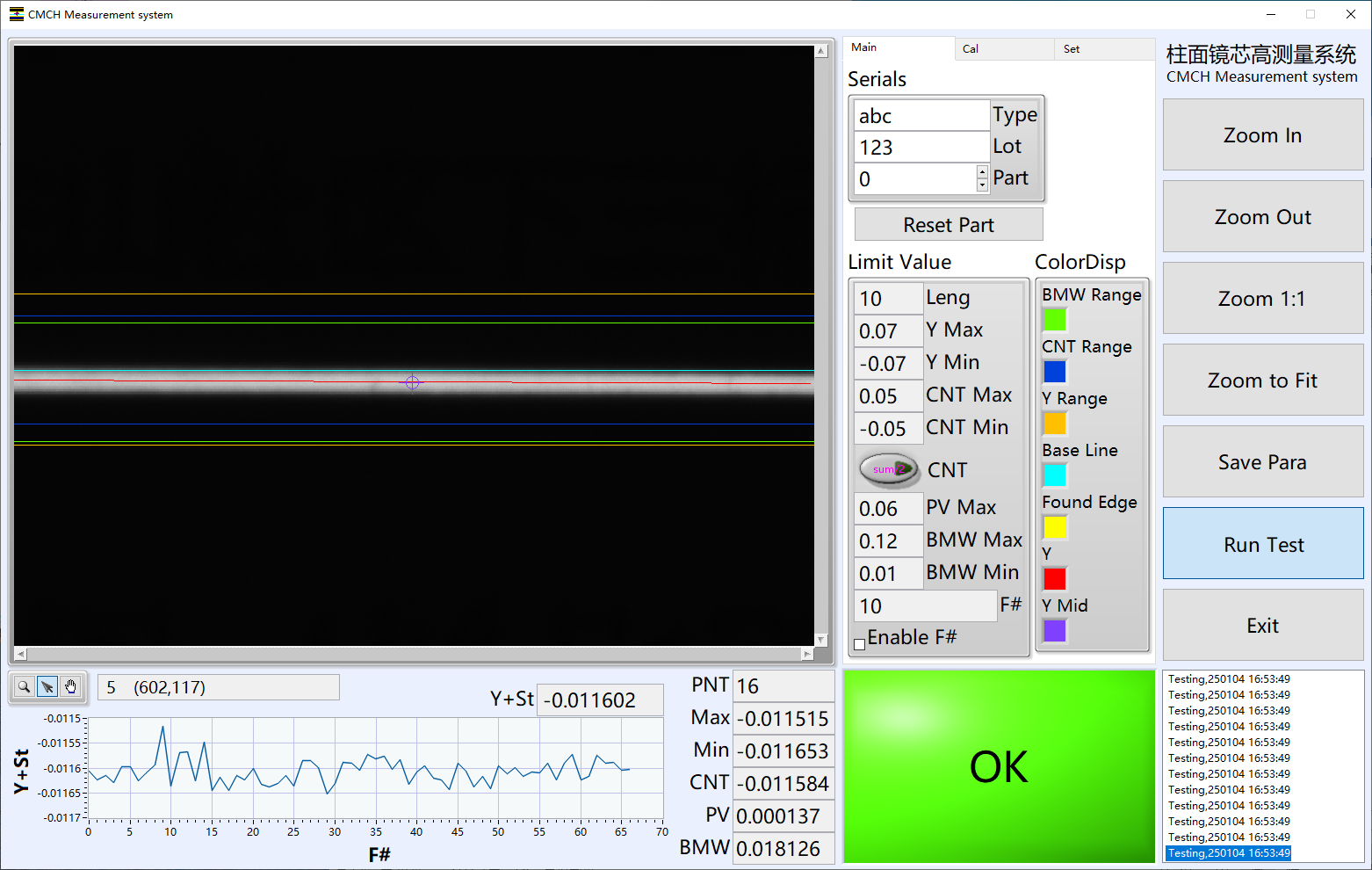
开始Run Test
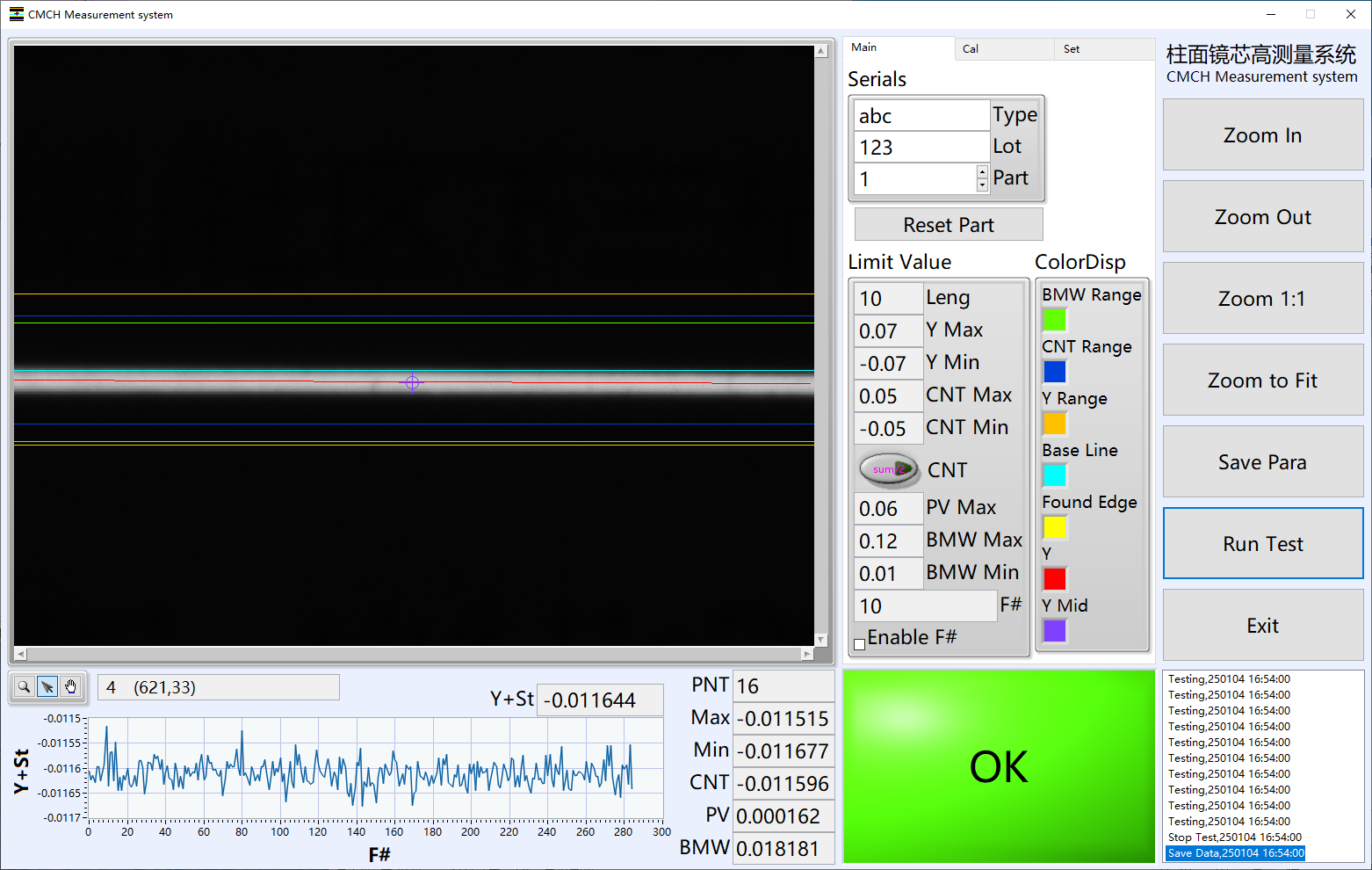
停止Run Test
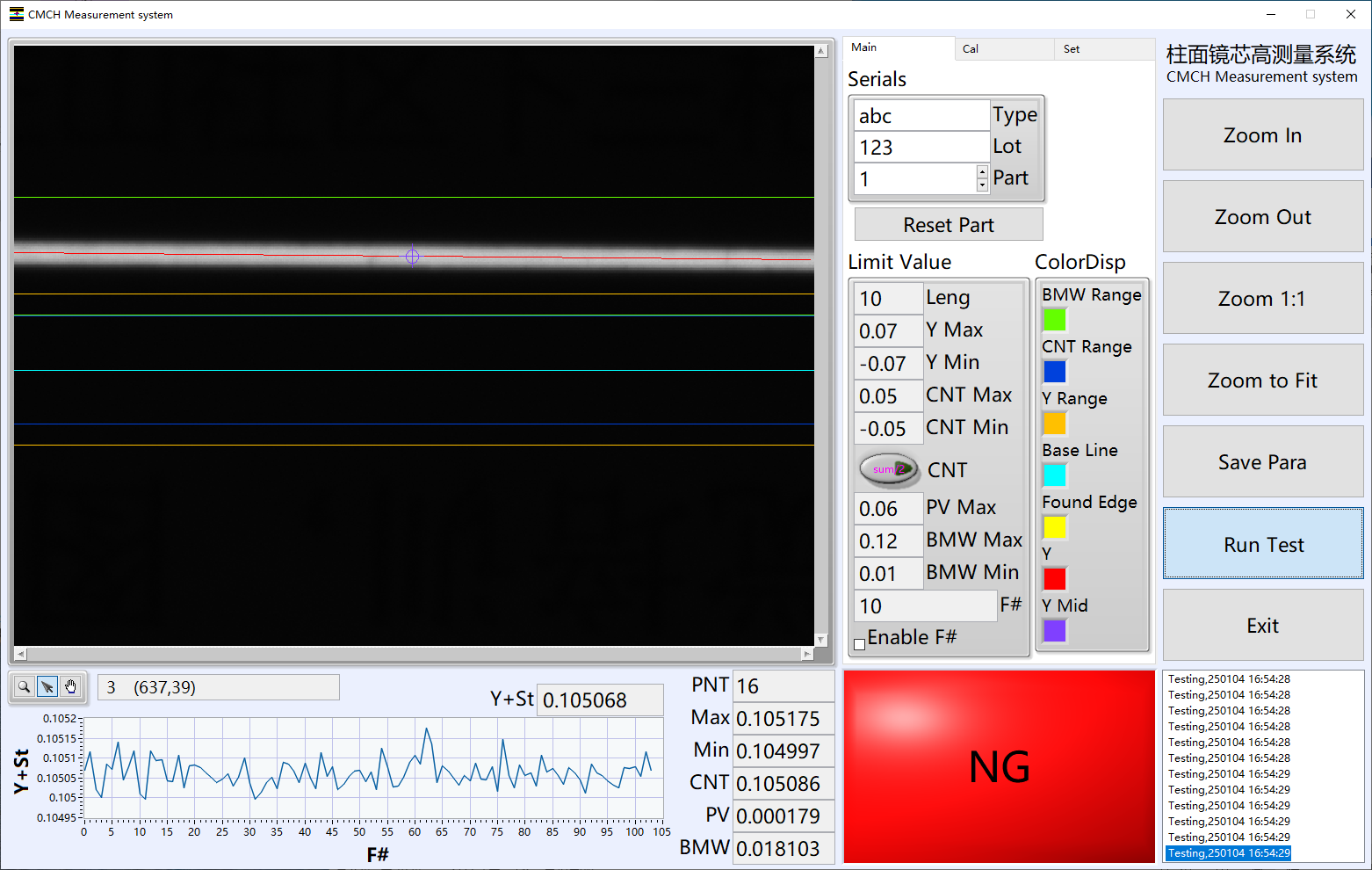
Run Test-NG
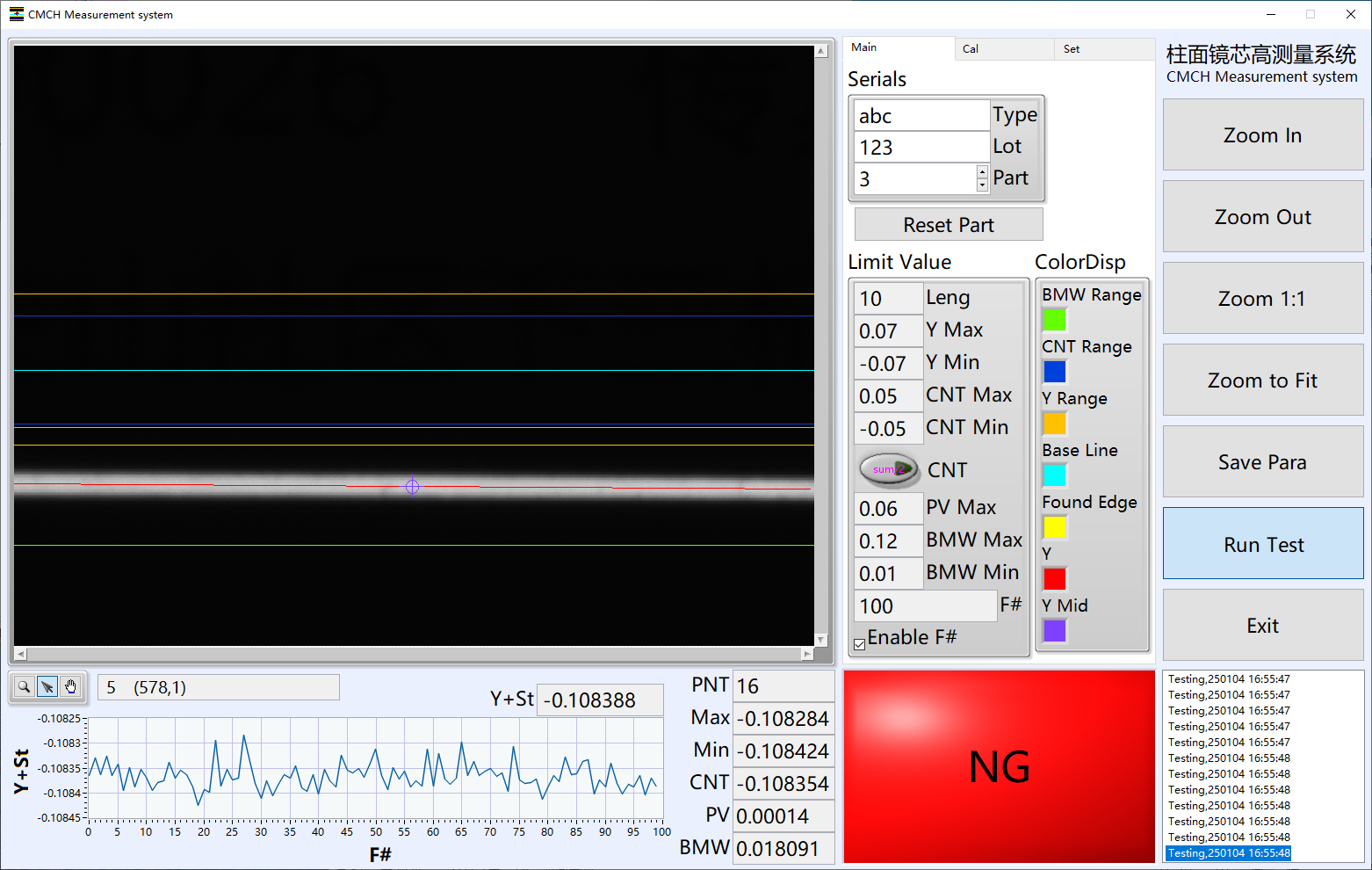
Run Test -F#=100
开始Run Test后开始测试,根据数据测量Ymm、Max、Min、CNT、PV、BMW等数据,并实时判断规格是否OK。停止Run Test时则停止测试,Part增加1。
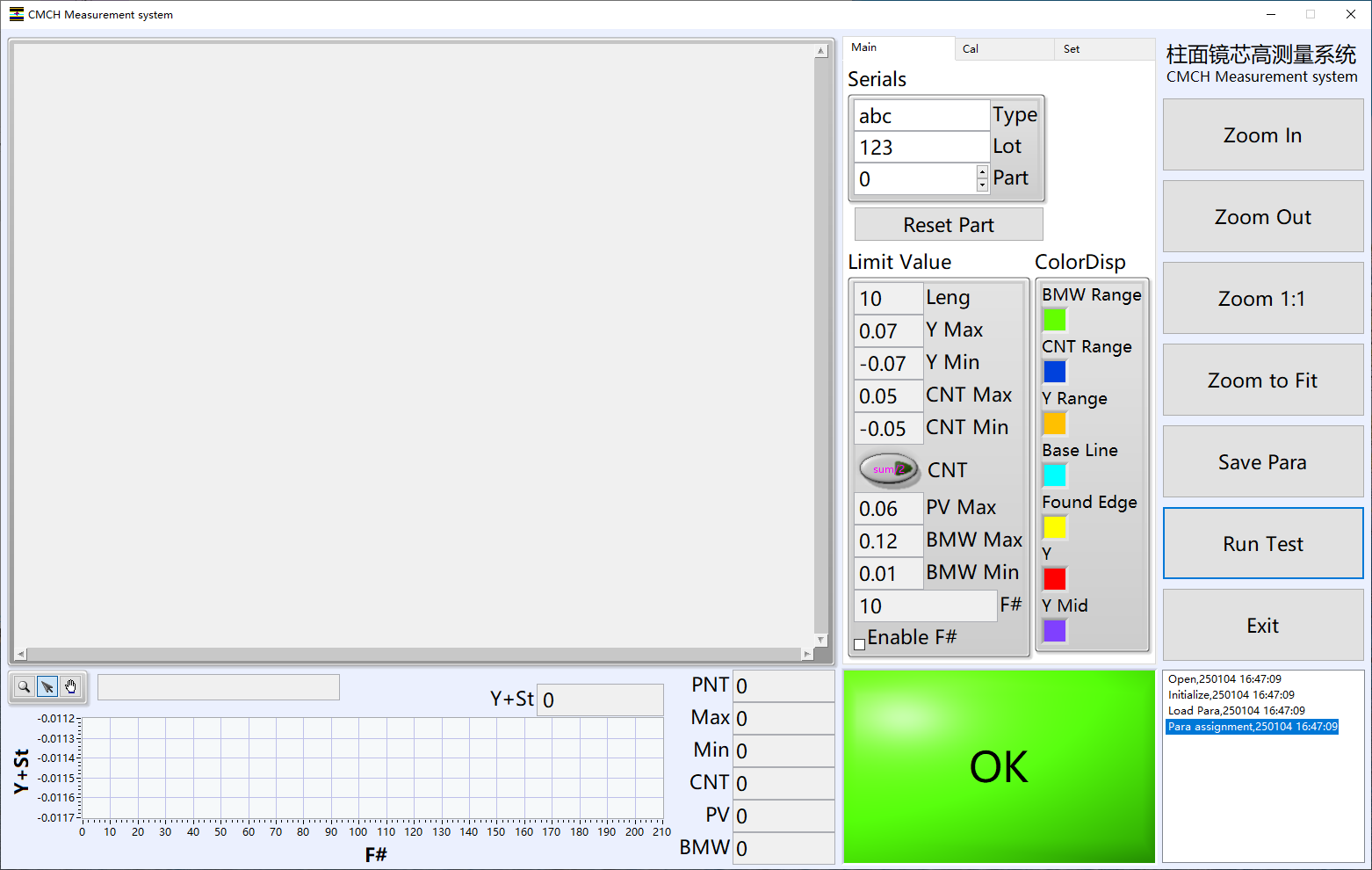
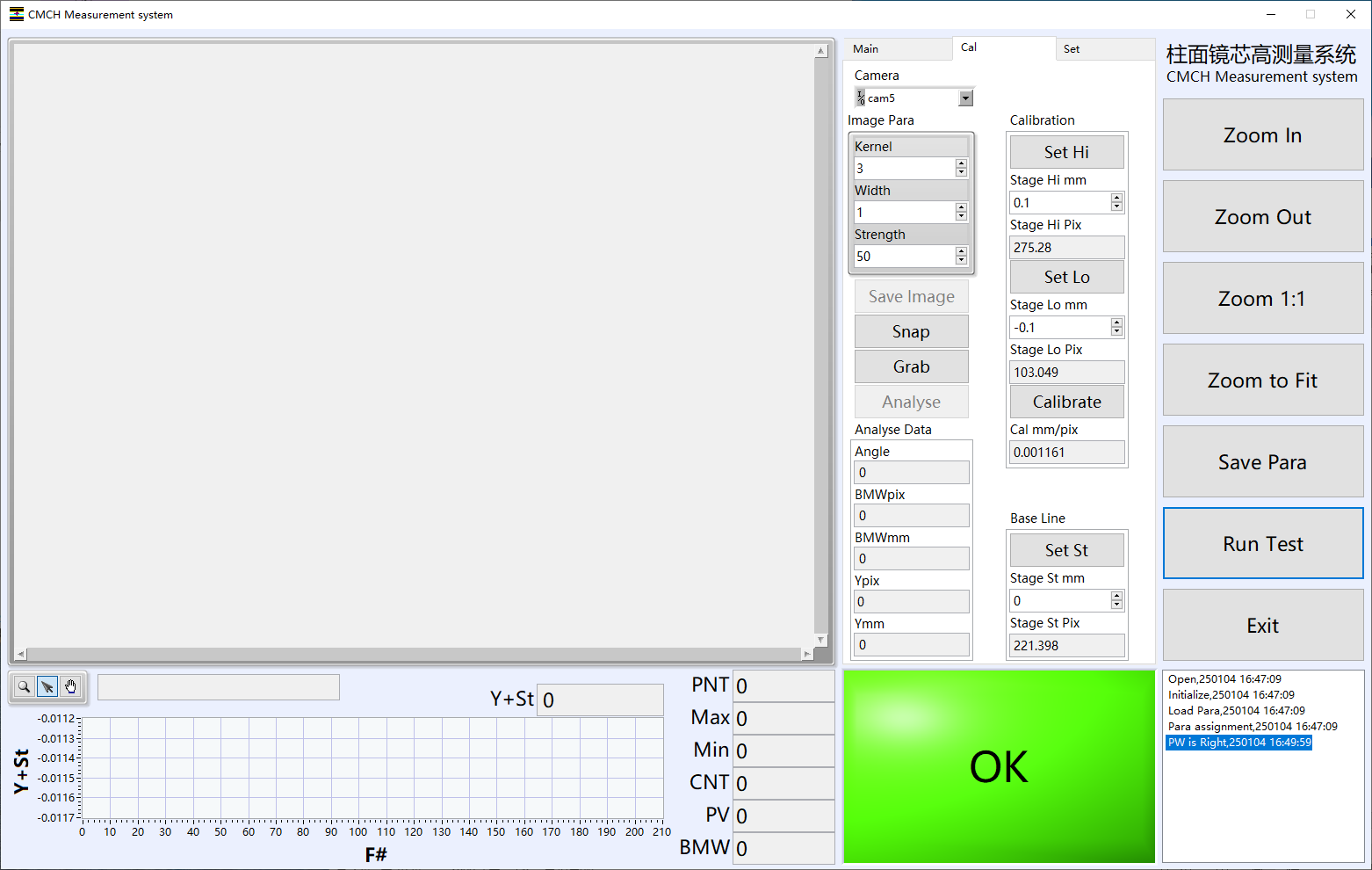
初始化界面
F# Y+St波形图:F#个Y+St的波形图。
Y+St:当前Y值+Stage St mm偏移量的值。
PNT:当前Y值时光束线的宽度像素值。
Max:开始测试后Y的最大值。
Min:开始测试后Y的最小值。
CNT:开始测试后Y的平均值。可根据Set中Limit中CNT选择的方法不同,计算方法不同,CNT选择Mean,是开始测试后Y数组的平均值,CNT选择Sum/2是开始测试后Y数组的(Max+Min)/2。
PV:开始测试后Y的波动范围,Max-Min。
BMW:光线Y值时光束线的宽度的毫米值。
OK/NG:结果显示,红色NG,绿色OK。
Zoom In:缩小图像。可鼠标滚轮缩放图像。
Zoom Out:放大图像。可鼠标滚轮缩放图像。
Zoom 1:1:将图像重置为1:1原始尺寸大小。
Zoom to Fit将图像设置为图像显示控件大小。
Save Para:保存当前的参数到配置文件中。
Run Test:运行测试。快捷键Enter回车。默认假,按一次真,开始测试,再按一次假,停止测量。点击Run Test后,功能选项卡会自动返回Main选项卡。
Exit:退出程序。快捷键Escape。
功能选项卡
Main:主体选项卡,默认显示项。
Serials序列:产品相关的序列
Type:产品类型,字符串,输入。在保存结果时,Type类型会作为文件名使用。所以Type不能包含/:*?”<>|等不符合Windows文件目录的符号,也不能为空。不满足条件的Type会提示。
Type不能为空也不能包含/:*?”<>|
Lot:产品的Lot号,字符串,输入。
Part:测量的产品编号。数值,输入,可重置为0。
Reset Part:重置Part。布尔
Limit Value:规格值,Set页面设置的Limit规格的显示项。
ColorDisp:颜色显示。Cal、Set设置的有关项的在图像中显示的Overlay的颜色描述。
BMW Range:设置的线宽的范围颜色。BMW Max Pix=Ypix+(BMW Max+BMW Min)/2/Cal;BMW Min Pix=Ypix-(BMW Max+BMW Min)/2/Cal。
CNT Range:设置的CNT(Y均值)的范围颜色。CNT Max Pix=(CNT Max mm+Stage St mm)/Cal+Stage St Pix; CNT Min Pix=(CNT Min mm+Stage St mm)/Cal+Stage St Pix。
Y Range:设置的Y的范围颜色。Y Max Pix=(Y Max mm+Stage St mm)/Cal+Stage St Pix; Y Min Pix=(Y Min mm+Stage St mm)/Cal+Stage St Pix。
Base Line:设置的Stage St Pix基准线的颜色。
Found Edge:找到边缘的颜色。在分析图像时,线宽找到的上下边的颜色。辅助显示,只在Cal中会显示。参数设置合理,能找到边时显示找到的边。Run Test时不显示该线。
Y:实际的光束线的等分线的颜色。关联Ypix。
Y Mid:实际的光束线的等分线中点的颜色。关联Ypix。
Cal:标定选项卡,和标定相关的选项卡。从Main选项卡进入时,需要输入密码:
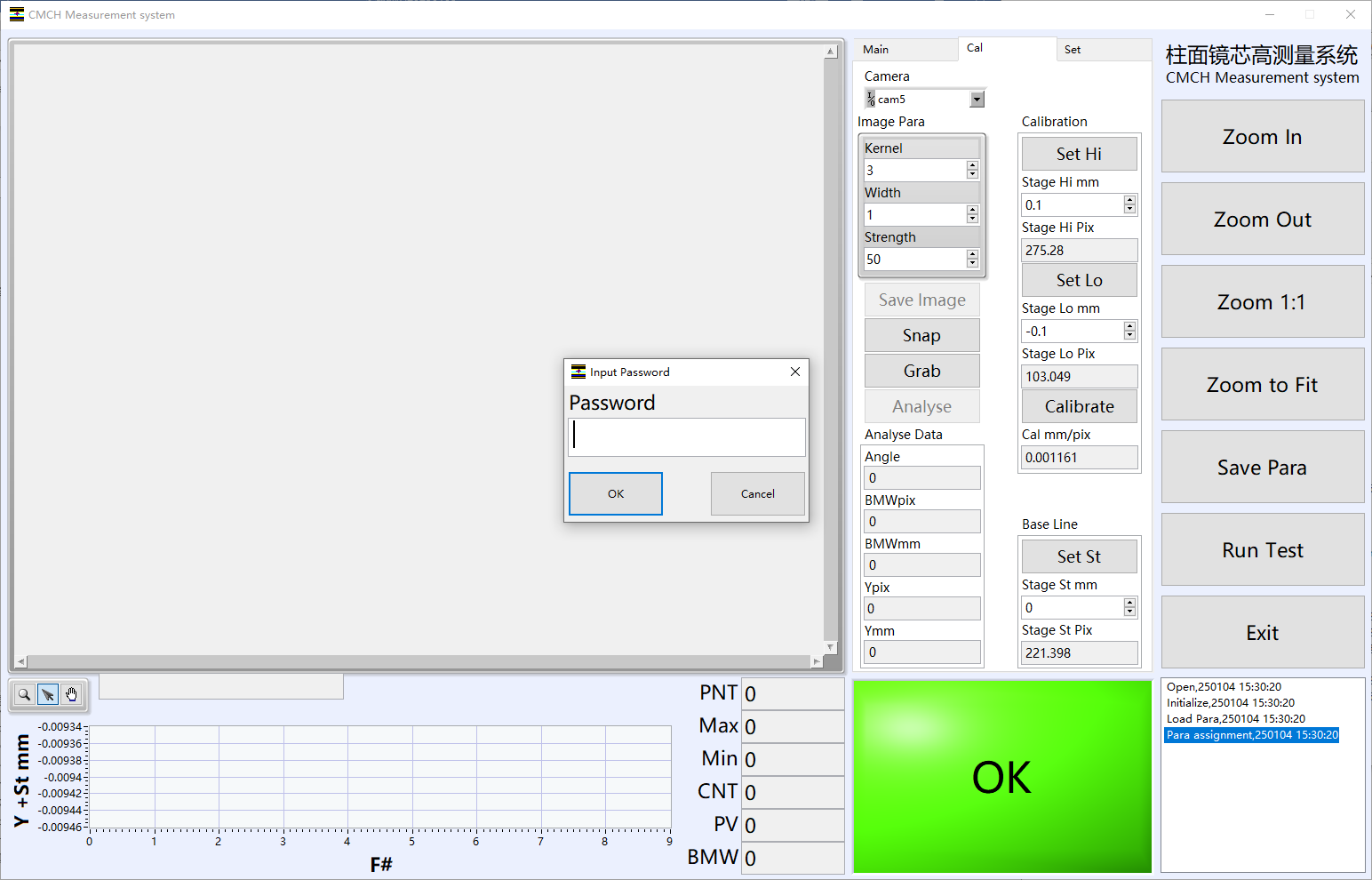
从Main进入Cal和Set时需要输入密码
默认原始密码是123456,可以在程序目录的Data目录的pw.ini文件中修改:
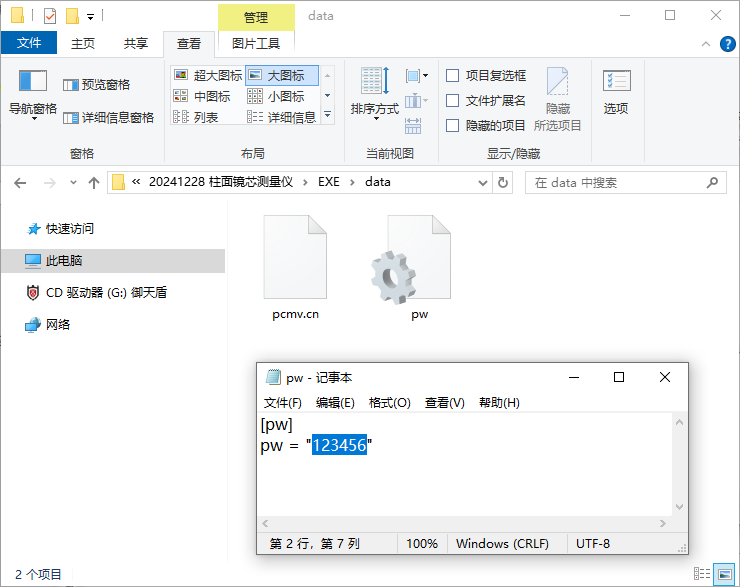
密码修改位置
只要是从Main切换到Cal或Main切换到Set,都需要输入密码确认权限。而从Cal切换到Set、Main或从Set切换到Cal、Main则不需要确认权限。
Cal
Camera:相机列表。从其中选择需要的相机进行测试。
Image Para图像参数:
Kernel:查找直边的内核大小,越大抗干扰内能越强,耗时越久。但是不建议设置的比线还宽,因为需要查找上下边,不超过线宽的一半。默认值3,最小值3,奇数。
Width:查找直边的投影宽度。越大,抗干扰能力、弧边查找能力越强,最小值1,默认值3。
Strength:查找直边的阈值最小边缘强度。强度=灰度值的变化量/像素的变化量,0~255。值越小,越容易找到直边,但是也越容易找错直边。值越大,则越容易找准直边,但是可能会找不到直边。
Save Image:保存图像。需要先采集图像、分析图像后,再保存图像。可选择保存原始图像、包含覆盖结果的分析图像:
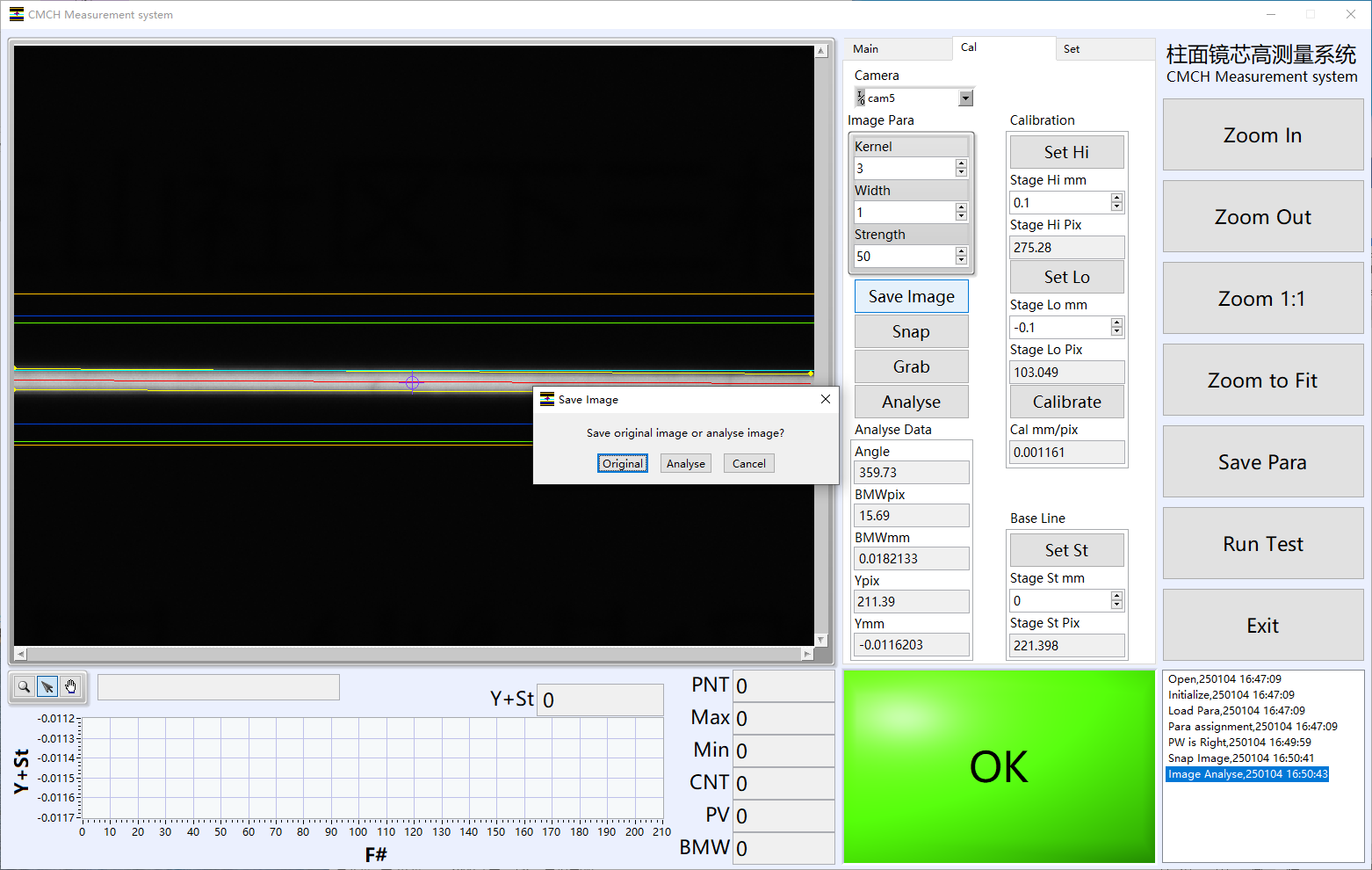
Save Image
Snap:采集一次图像。
Grab:连续采集图像。
Analyse:使用Image Para中的参数分析图像。分析图像分析使用的是查找直边函数,会针对图像中的白线查找上边和下边。函数使用整个图像做ROI查找直边。会同时查找上边和下边。上边使用从上到下,上升沿(黑到白)查找。下边使用从下到上,上升沿(黑到白)查找。找到上边和下边后,使用等分线函数查找上下边的等分线。之后利用中点函数,求等分线的中点。
Analyse Data:分析图像后的数据。
Angle:等分线的角度。0或360度左右的值。如果偏差较大,可能光束不水平。不是需要处理的数据,仅供参考。
BMWPix:光束白线的像素宽度。
BMWmm:使用当前的标定参数,根据BMWPix计算的毫米宽度。如果未标定或还是之前的标定,则BMWmm则为0或为之前的值,不一定准确。需要根据Cam mm/pix计算。
Ypix:光束线的等分线中点的Y值像素值。
Ymm:光束线的等分线中点的Y值毫米值。需要根据Cal mm/pix计算。
Calibration:标定相关的内容。
标定的目标是将像素单位转换为真实世界单位。本程序中是将pixel转换为mm。在不考虑镜头畸变时,一般使用简单标定方法,即标定系数cal=毫米mm/像素pix。
Set Hi:设置高位。根据当前采集图像、分析图像的结果Ypix来设置高位的毫米和像素值。其中毫米值通过Stage Hi mm输入控件来输入。像素值则由当前的Ypix赋值给Stage Hi Pix。所以,Set Hi之前,必须先采集图像、分析图像。下面的Set Lo相同的要求。
Stage Hi mm:高位的具体毫米值。需要用户输入。
Stage Hi Pix:高位的具体像素值。由当前分析图像的Ypix值得到。
Set Lo:设置低位。需要重新调整到低位后采集图像、分析图像后再设置。
Stage Lo mm:低位的具体毫米值。需要用户输入。
Stage Hi Pix:低位的具体像素值。由当前分析图像的Ypix值得到。
Calibrate:根据设置的高位、低位,计算标定系数。
Cal mm/pix:当前设置的高位和低位计算得到的标定系数。Cal mm/pix=(Stage Hi mm- Stage Lo mm)/ (Stage Hi Pix- Stage Lo Pix)。
Base Line:基准线相关的数据。
Set St:根据当前采集图像、分析图像的Ypix,设置基准线的位置。
Stage St mm:用户输入当前的基准线的实际毫米值,一般是0值,也可以设置其他值。是值时,和Stage St Pix是重合的。该值会影响Y Max、Y Min、CNT Max、CNT Min四个值在图像显示的位置(使用pix值),变量Pix=(变量mm+Stage St mm)/Cal+Stage St Pix。
Stage St Pix:当前的Ypix值设置为参考基准线的像素值。图像中显示的青色基准线是此值。该值会影响Y Max、Y Min、CNT Max、CNT Min四个值在图像显示的位置(使用pix值),变量Pix=(变量mm+Stage St mm)/Cal+Stage St Pix。
基准线的数据,不会参与具休光束线宽BMW、光束线Y等相关数据的计算。但是因为基准线相当于原点,和图像原点不重合,该值会影响测量规格值的具体显示位置。
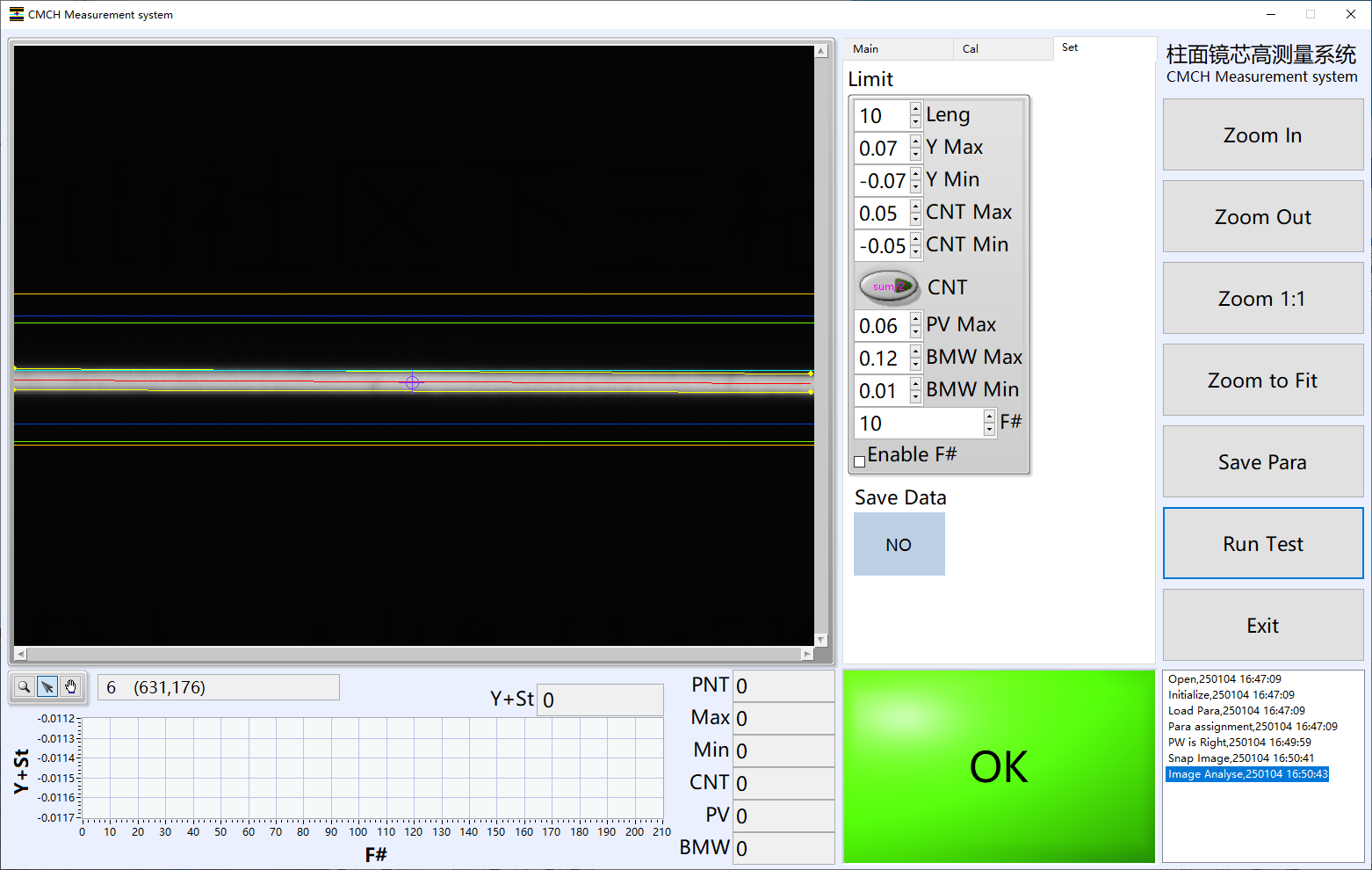
Set
Set:设置选项卡。从Main转换到Set时需要输入密码,从Cal转换到Set时则不需要。
Limit:具体的规格值。用户输入。Limit设置的值,会在Main中的Limit Value中显示。
Leng:镜片的长度。目前没有比较相关的数据。
Y Max:实时Y的最大毫米值。
Y Min:实时Y的最小毫米值。Y Max>=Y>=Y Min时OK。
CNT Max:平均Y的最大毫米值。
CNT Min:平均Y的最小毫米值。CNT Max>=CNT>=CNT Min时OK。
CNT:CNT的计算方式。Mean求测量期间数据CNT的平均值。Sum/2求测量期间数据CNT的最大值、最小值,然后求二值的平均值:(Max+Min)/2。
PV Max:Max-Min的最大值。PV<=PV Max时OK。
BMW Max:实时线宽的最大毫米值。
BMW Min:实时线宽的最小毫米值。BMW Max>=BMW>=BMW Min时OK。
F#:连续Run Test时,是否截取指定数量的数据。会影响CNT、Max、Min、PV等值。
Enable F#:是否启用F#。不勾选时,上面的F#参数设置不起作用。测量期间数据自动增加至无穷大。勾选时,则启用F#,只保留最新的F#个数据进行CNT、Max、Min、PV等值计算。F#无穷大时,效果等同于不启用F#。
Save Data:是否保存数据。勾选时,会在停止Run Test时自动保存数据到程序目录的Result目录下。文件名使用Type类型。所以Type不能包含/:*?”<>|等不符合Windows文件目录的符号,也不能为空。不满足条件的Type会提示。
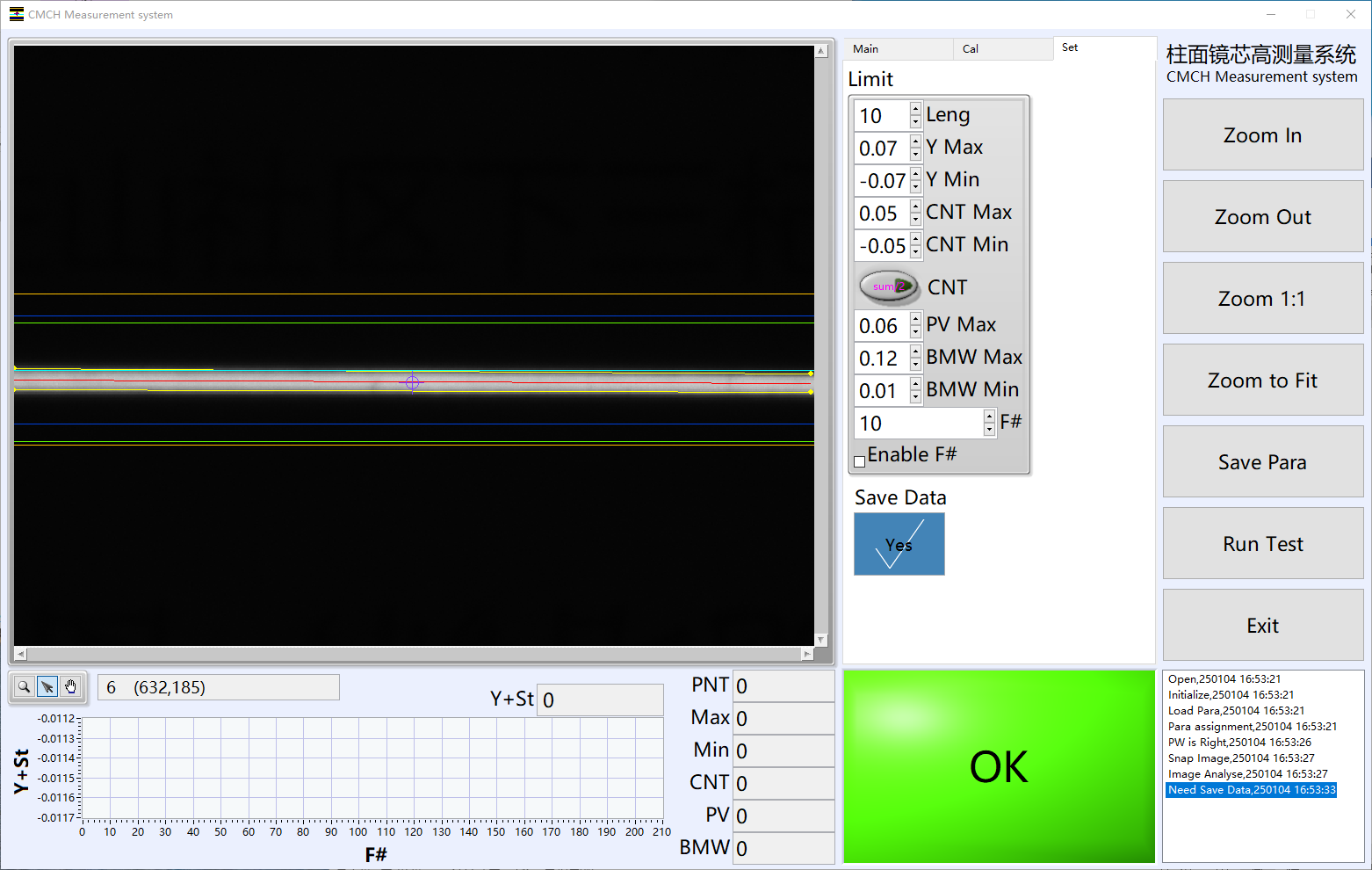
勾选Save Data
下一篇:没有了!
 售前咨询专员
售前咨询专员
